Embedded World 2025
Custom BSPs & Future-Ready Embedded Solutions

Build, Maintain & Secure
Custom Linux BSP

Passenger Safety System

Specifications:
SOM: i.mx8M-Mini, 2GB RAM, 8GB eMMC
Multimedia: 8xDigital Mic with ANC, Speakers, FPD-Link SerDes Camera for DMS
Comm: 4G, GPS, BT Sensor: Temp, Humidity, Accelerometer
Development:
BSP Development Yocto Linux, Board-Bringup, Stacks Integration, Sample Applications &
Field testing support, BSP Upgrades & Maintenance
Timeline, Efforts & Cost: 6 Months / 18ManMonths / €30 PerHr

Smart Helmet

Specifications:
SOM: SC600T, 4GB RAM, 32GB eMMC
Comm: 4G, GPS, BT, LoRA, WalkieTalkie Multimedia: Dual Camera, Digital Mic, Speakers,
Sensor: Temp, Humidity, Accelerometer, UWB
Development:
BSP Development Yocto Linux, Board-Bringup, Stacks Integration, Sample Applications & Field testing support
Timeline, Efforts & Cost :
6 Months / 15ManMonths / €30 PerHr
Custom Android BSP
for Industrial Applications


Rugged Android Terminal

Specifications:
SOM: i.mx8M-Mini, 2GB RAM, 32GB eMMC
Comm: 4G & 5G, GPS, BT, Wifi Multimedia: 2xDigital Mic with ANC, Speakers, Dual USB Camera
Sensor: Temp, Accelerometer, TPM, Tamper, Fingerprint
Development:
Android-11 BSP Development, Board-Bringup, Encryption Card Integration, Sample Applications & Field testing support, BSP Upgrade to Android-14
Timeline, Efforts & Cost : 9 Months / 24 ManMonths / €30 PerHr
Android Based Drone Ground Controller

Specifications:
SOM: i.mx8M-Mini, 2GB RAM, 32GB eMMC
Comm: 4G, GPS, BT, SubGiz Telematry Port, 6" MIP Display with Touch Sensor: Temp, Accelerometer
Development:
Android BSP Development, Board-Bringup, QGC Integration, Sample Applications & Field testing support, BSP Upgrade & Maintainance
Timeline, Efforts & Cost: 6 Months / 18 ManMonths / €30 PerHr
Custom RTOS BSP
for Safety Critical Applications


Zephyr & LVGL HMI
Custom Board Specifications:
SoC: Renesas RA8, Cortex-M85 @480MHz
Display: Mipi 6" TFTLCD with touch Screen
Memory: 64MB SDRAM, 64MB NOR OctaSPI, Comm Interface: Ethernet, USB, CAN, RS485, RS232
Development:
Zephyr Porting on RA8-D1 Board, Driver Integration for all the communication Interfaces, Mipi LCD with Touch Integration, LVGL Integration, Custom Board BSP with sample applications
Timeline, Efforts & Cost: 4 Months / 6 ManMonths / €30 PerHr

Zephyr Wireless Sensor Nodes

EFR32FG28 NIC

phyWAVE-FG28
microBUS
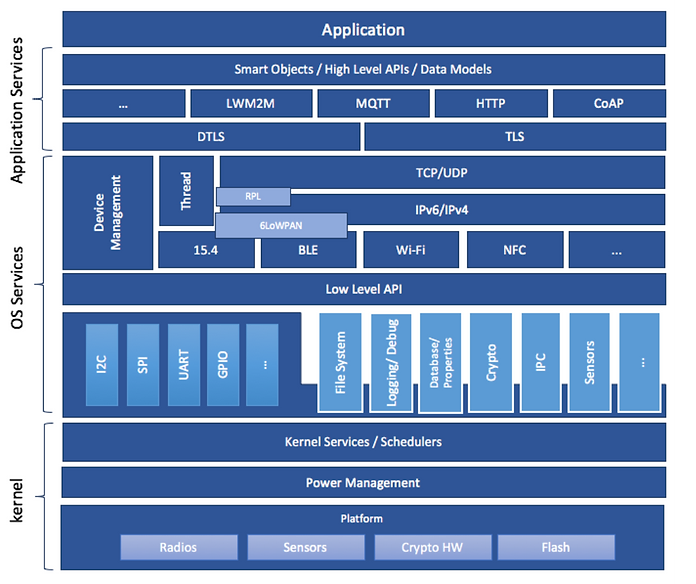
Zephyr Architecture



phyVERSO-EVCS
ready Platform to develop EV Charger


Specifications:
SOM: phyCORE-AM62x
Comm: 4G, WiFi, BT, RS485 Modbus, CAN-FD, Ethernet, PLCx2
Display: Dual LVDS Display Interface with Touch, Sensor: Temp, NFC/RFID Reader
Software Features:
Preconfigured BSP with EVEREST stack for OCPP 2.0.1, ISO15118, IEC 61851,
GUI support: QT/LVGL, Energy Mgmt Load Balancing, Remote Update, Remote Mgmt

EVEREST Open Source
EV Charging Framework
under THE LINUX FOUNDATION PROJECTS

CitrineOS is to develop and maintain an open source Charging Station Management System (CSMS) software stack



Industrial Gateway Solution
with ready Device & Cloud Software


-
phyCore-i.MX8MPlus (4x Cortex-A53 1,8 GHz, Corex-M7, VPU, GPU)
-
Neuronal Network Accelerator up to 2.3 TOPS
-
Onboard Image Signal Processor
-
2x MIPI CSI-2 Camera,
-
Display: HDMI & LVDS 10.1" with touch
-
Dual 1Gbps Eth, USB3.0x2,PCIe-3.0
-

OpenSource Gateway Framework

-
Cloud Independence: Push data to any cloud platform
-
Lightweight & Scalable: Optimized for embedded devices
-
Rapid Integration: Simplifies IoT data pipelines
-
Pre-configured BSP with Thin-Edge.io gateway stack, including integrated MQTT & device management
-
Native support for leading cloud providers such as AWS, Azure, and Google Cloud. Easily adaptable to other cloud platforms or on-premises servers as required

phyBOARD-Pollux Gateway

Advance Robotic Solution
with ROS 2 Stack

ROS


phyBOARD-AM62A
Platform to Develop Robotic Solutions

-
Specifications
-
Processors: Quad-Core Arm® Cortex®-A53 (up to 1.4 GHz)
-
• 2x Cortex®-R5F core (up to 800 MHz)
-
• 1x C7 as Deep Learning Accelerator
-
• Vision Processing Accelerators with Image Signal Processor (ISP) (upto 5 MP@60 fps)
-
Camera interface (1x MIPI CSI-2 v1.3)
-
Video Encoder/Decoder • Two Gigabit Ethernet
-
Interfaces: 8x UART, 4x SPI, 5x I2C, 2x USB 2.0, 3x CAN FD, 3x SDIO, 3x McASP for audio •

phyBOARD-AM62A
Platform to Develop Robotic Solutions


-
Specifications:
-
SOM: phyCORE-i.MX 8M Mini
-
Memory: 1-4GB RAM, 4-32GB eMMC, SD/SDIO/MMC
-
High-Speed: Mini PCIe Conn x1, Micro-AB x1, USB-A x1
-
Peripherals: CAN x2, RS-232 x2
-
Connectivity: Gbit Eth x1, WiFi, BLE 4.2,
-
Multimedia: Display MIPI DSI/FlatLink LVDS, Camera x1 MIPI CSI-2
-
AudioSAI, Voice Array Connector
Dimensions: 100 x 100 mm
OperTemp: -40° to +85° C
Supply: 12-24V

phyCORE-RT117x SOM
for FlightController

-
Specifications:
-
Processor: NXP RT1176 @1GHz (Arm Cortex-M7 + Arm Cortex-M4F)
-
Memory: RAM 64MB SDRAM, NOR 256MB Max, EEPROM 4 KB
-
SD/SDIO/MMC Interfaces x2,USB 2.0 OTG x2
-
Peripherals: CAN-FD x3, GPIOs, I2C x6, FlexPWM x4, SPI/SSP x6, UART x12
-
Ethernet: 1x 10/100Mb, 1Gb AVB, 1Gb TSN
-
Multimedia: Display MIPI-DSI x1, Camera MIPI CSI x1, Audio SAI x4
